Na troje babka wróżyła? A może na czworo? W poprzedniej notce Królik na symplektycznej orbicie zabraliśmy się za klasyfikację orbit hamiltonowskiej dynamiki dla kwadratowych hamiltonianów. Sprowadziło się to to do powierzchni w trójwymiarowej przestrzeni opisanych równaniami
1) z2- x2 - y2 = r2 > 0
2) z2 - x2 - y2 = - r2 < 0
3) z2 - x2 - y2 = 0
Przypomnę, że przy danych x,y,z mamy macierz X
-y x+z
x-z y
Ta macierz powstała z hamiltonianu h: X = Jh, gdzie J jest macierzą
0 1
-1 0
Oznaczając przez z wektor-kolumienkę (x,p) rozwiązanie równań ruchu to
z(t) = M(t) z(0)
gdzie M(t) = exp (tX).
Tyle tytułem przypomnienia. Teraz zabieramy się za analizę. A dalej za analizę tej analizy i za „co z tego wynika?”.
Najpierw przypadek 1). Ten przerobię dokładnie. Inne już po łebkach (mniejszych lub większych, bo łebki bywają różne).
z2- x2 – y2 jest stałe na orbicie. Załóżmy, że jest dodatnie, powiedzmy równe +1. Co to za orbita? Gdy z2- x2 - y2 = 1, to
z = ±√ (1+x2+y2)
To hiperboloida dwu-powłokowa. Obrazek możemy skopiować z Wikipedii:
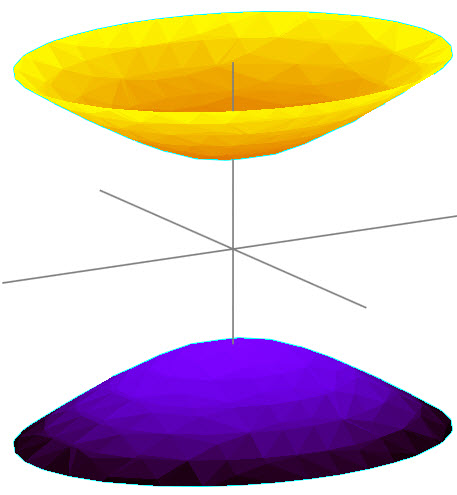
Każdy punkt na tej powierzchni wyznacza pewną dynamikę. Dynamiki odpowiadające różnym punktom są do siebie „podobne”. No to weźmy jeden taki punkt, powiedzmy x=0,y=0,z=1. To czubek górnej powłoki. Odpowiadająca temu punktowi macierz X to
0 1
-1 0
Wychodzi, że to nasze J. Ponieważ X=Jh, to h jest macierzą jednostkową
1 0
0 1
Stąd h(x,p) = x2+p2. Z dokładnością do współczynnika jest to hamiltonian dobrze nam znanego oscylatora harmonicznego.
Obliczamy M(t) = exp (tX) dla tego przypadku. Macierz tX to macierz
0 t
-t 0
Trzeba obliczyć jej eksponencjał. Można to robić na palcach, można zapytać mądrego programu, można zapytać Tichego. Ja zapytałem programu Mathematica:
MatrixExp[{{0, t}, {-t, 0}}]
Otrzymałem odpowiedź:
{{Cos[t], Sin[t]}, {-Sin[t], Cos[t]}}
Czyli M(t) jest macierzą
cos(t) sin(t)
-sin(t) cos (t)
Jeśli punkt startowy wybiorę x(0)=0, p(0)=1, dostaniemy
x(t) = sin(t)
p(t) = cos(t)
Jest to okrąg w przestrzeni fazowej. Punkt porusza się po tym okręgu w kierunku zgodnym z kierunkiem ruchu wskazówek zegara.
Położenie x(t) sinusoidalnie oscyluje. Pęd też oscyluje, tyle, że w przesuniętej fazie. Jak przystało na sprężynkę-oscylator.
Wypada się zabrać za przypadek drugi, gdy z2 - x2 - y2 = - r2 < 0. Co to za pies? Co za dynamika? A potem za trzeci i czwarty.
W następnej notce.